销售/售后热线:
400-660-3568(转2)
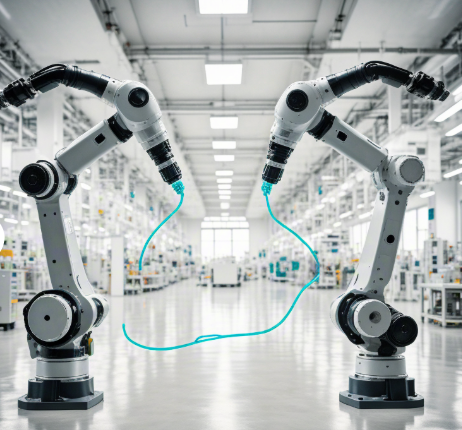
轨迹预测动态路径调整工作环境的数字建模
高精度定位机械臂“傻瓜式”数据训练平台
权衡多机械臂效率、能效、安全性等动态约束管理(速度、加速度等)MPC策略仿真验证
了解更多