销售/售后热线:
400-660-3568(转2)
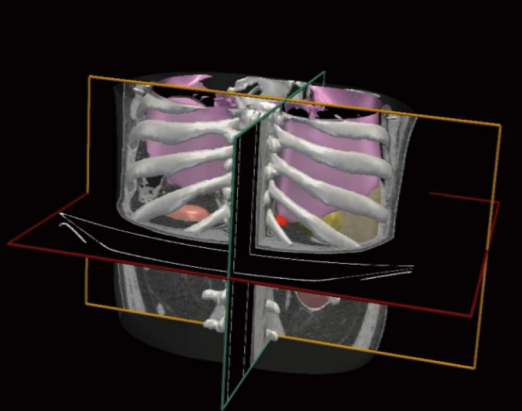
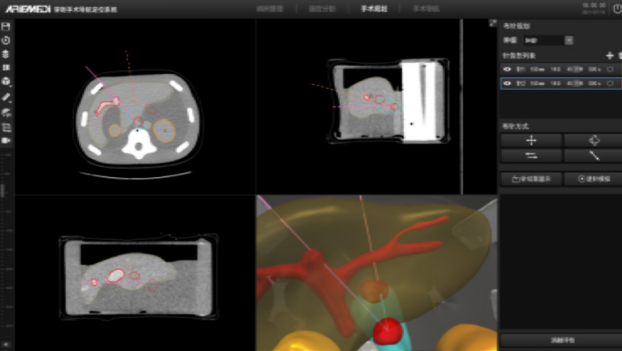
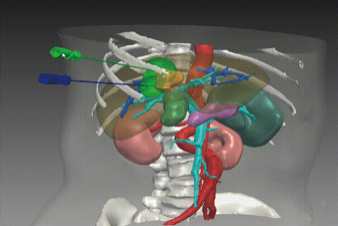
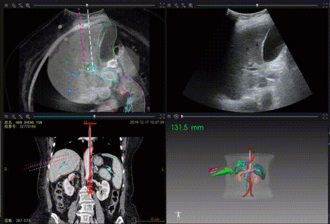
CT/MRI数据重建三维模型组织、器官分割
穿刺路径规划多针穿刺协同消融效果预测
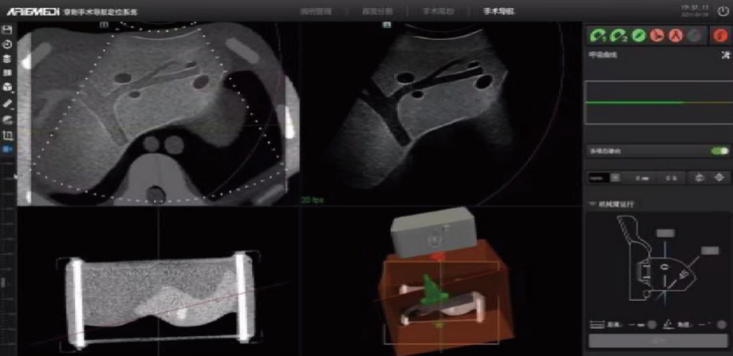
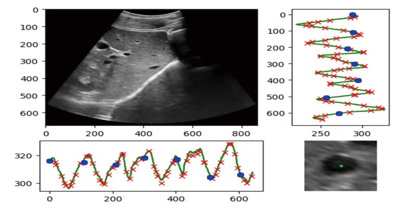
实时穿刺引导多模态影像融合(CT/MRI/超声等影像)呼吸运动补偿
运动仿真力传感控制机械臂避障
了解更多