

看到以上图片,你会一眼明白这是一个紧张而精细的手术场景。图中被无菌布覆盖隆起部分是病人的躯体;而医生专注操作的区域,是病人的手术部位;医生灵活控制着手术器械,巧妙地避开周围的血管、神经和其他重要组织,安全高效地完成此次手术。
01
机器人如何理解手术?
这种对场景直观且迅速的理解,是人类应用直觉理解问题的本能。然而,对于机器人而言,以上任何一个问题都可能难倒它。它无法像人类那样一眼洞察全局,而是需要依靠精密的传感器、复杂的算法和大量的数据训练,才能构建起对手术场景的理解。
病人的躯体在哪里?手术部位的具体位置在哪里?对于机器人而言,需要通过图像识别技术、结合术前扫描的影像资料、算法分析等综合多种技术来精确定位;手术器械的避障操作,更是对机器人场景理解力和运动控制力的极大考验。
人类的理解能力有的时候很抽象,但手术机器人的理解力绝不能抽象,因其操作直接关联到手术的成功与否和患者的生命安全。每一毫米的精准移动、每一次力量的微妙调控,都是基于对患者生理结构、手术路径规划以及潜在风险的精确计算与理解。尽管手术机器人在某些方面已经展现出了超越人类的能力,但在场景理解力和安全稳定操作领域,仍然是我们需要不断研究的课题。
02
瑞瞳PRO的超绝理解力
艾瑞迈迪推出的「瑞瞳PRO」是一款具有手术场景的超绝理解力的产品。在复杂而精细的手术过程中,瑞瞳PRO展现出了非凡的洞察力。

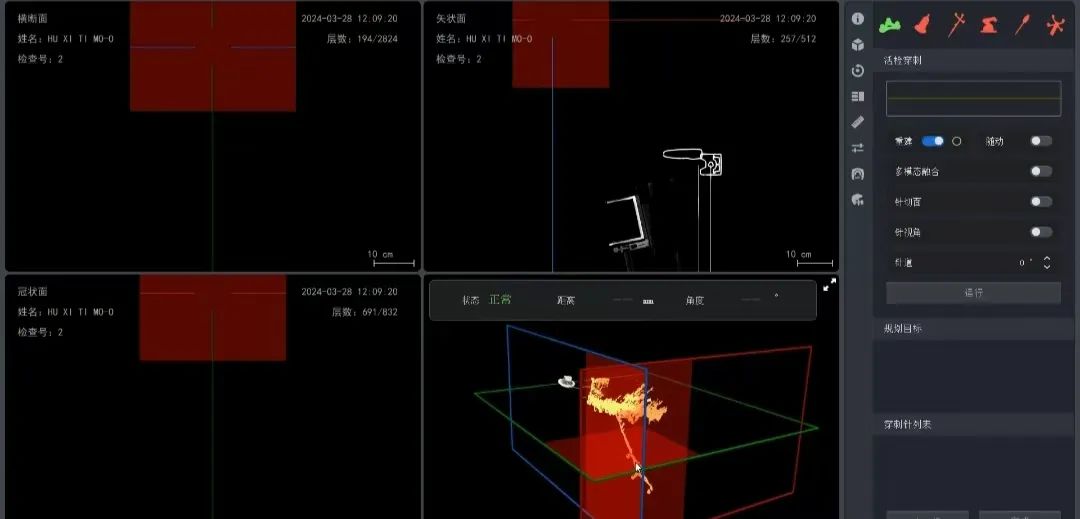
首先,区别于其他大部分相机只能对手术具体部位的定位,瑞瞳PRO能够准确理解机械臂运动受术区内器械及病人躯体的阻碍情况,引导机械臂进行避障;同时,实现手术区域的动态三维场景重建,帮助术者更好地规划手术路径;此外,它还能够实时、精准地反映手术器械相对于患者的位置变化,帮助医生提前预判并调整策略,确保每一步操作都既安全又高效。
以上得益于其全球首创的“多源时空光场融合技术”,打造了多源视觉定位与重建系统,将定位追踪、三维表面重建、真实场景映射、激光定位等集成于一体,开创了多源时空光场融合技术的先河。瑞瞳PRO系统重建与定位精度均可达到亚毫米级,将以往15-30分钟的配准时间缩短至数秒内完成。
STEP 01
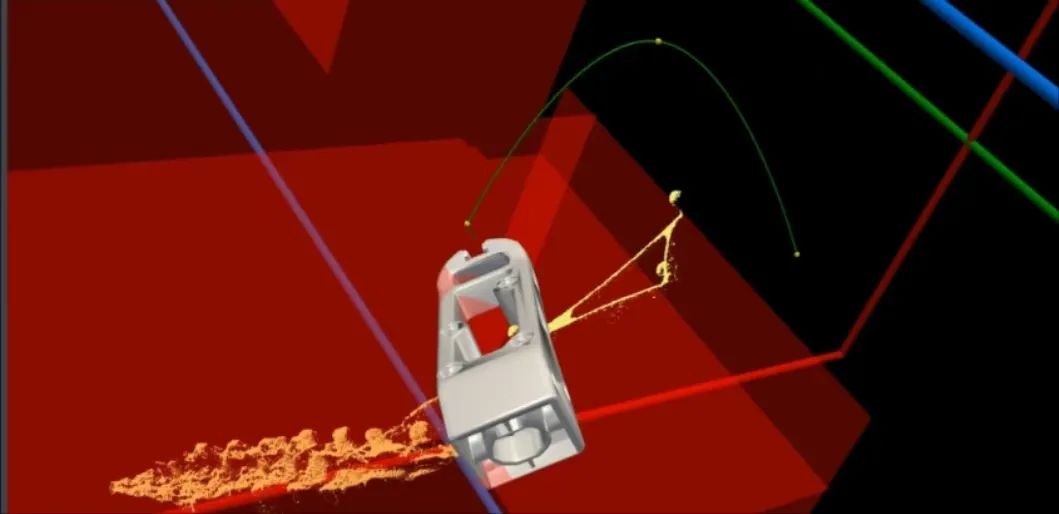
三维重建

瑞瞳PRO凭借其高精度点云数据重建技术,精确还原手术场景,清晰确定场景中的物体的位姿和形态,包括细小、高反光的手术器械。
STEP 02
路径规划
完成行进路线设计,使机械臂避开手术器械等障碍物。
STEP 03
模拟仿真
规划完成后,进行机械臂末端的模拟运动仿真,判断机械臂是否能够避开障碍。
STEP 04
安全避障
机械臂安全高效地避开障碍,并到达预定的规划位置。
瑞瞳相机在手术导航过程中,不仅实现了跟踪目标的精准定位,更展现出了强大的手术场景理解能力,未来具有广泛且深远的医疗领域应用潜力。
近日,艾瑞迈迪受邀参展2024年第90届
中国国际医疗器械(秋季)博览会(CMFF)
想近距离感受瑞瞳PRO的超绝理解力,
欢迎来现场~
更有「瑞瞳」™全系产品及
通用导航设备「儁迈」等你来~