
近年来机器人产业应用需求旺盛,产业发展受到国家的高度重视和政策支持。在医疗领域,从美国药品监督管理局及国际与国内标准所采用的术语来看,采用机器人技术的辅助手术和辅助手术系统(简称“RA设备”)通常被称为医用手术机器人[1]。根据应用原理分类,当前已上市的手术机器人以主从控制式和图像引导式两大类占主导地位[2]。其中骨科手术导航设备多见于采用图像引导技术的机器人设备[3-4]。既往研究表明,采用机器人技术的骨科手术导航设备(下文简称“骨科手术导航设备”)可辅助医生在术中进行精准定位,提高手术安全性并减少医生的辐射暴露,在关节置换术和脊柱外科手术中具有广阔的应用前景[5]。
骨科手术导航设备以医学影像数据为基础,可将患者术前或术中影像数据与手术时患者的本体生理结构准确对应,其核心功能是术中定位和手术规划。例如,在术中通过实时跟踪手术器械并将手术器械的位置在影像上以虚拟探针的形式实时更新显示,使医生明确手术器械与患者生理结构的相对位置,保障外科手术更快速、精确、安全地进行[6-7]。骨科手术导航设备一般包含机械臂系统、导航跟踪系统和计算机控制系统三大部分(图1)。其中计算机控制系统可根据医学影像进行3D建模及手术规划并实现对各部分的控制,机械臂系统可对末端执行器进行精准定位与动作控制,导航系统负责患者坐标系、机械臂坐标系、术前影像坐标系的统一与实时追踪补偿[8]。
截至目前,我国发布的机器人相关的国家标准已达110余个,涉及内容包括机器人通用性能、软硬件安全、电气安全、电磁兼容性等[9-10],而针对医用机器人专有性能的标准较少。2021年国家药品监督管理局发布了YY/T1712-2021《采用机器人技术的辅助手术设备和辅助手术系统》[1],该标准规定了通用手术机器人的基本性能指标和检测方法,包括导航引导下的RA设备的位置准确度、位置重复性和系统精度,但未专门针对导航性能指标作出要求,系统精度亦未包含骨科涉及的点、线、面规划的性能测试方法。为满足骨科手术导航设备的性能评价,2023年国家药品监督管理局制定了YY/T1901《采用机器人技术的骨科手术导航设备要求及试验方法》[11],其针对骨科手术导航设备的产品特点提出了专用要求。本文对YY/T1901-2023标准的适用范围、术语定义和试验方法进行重点解读,旨在为骨科手术导航设备的研发、质量评价及上市后监管提供参考,并指导检测机构按照标准要求开展上市前的质量评价工作,促进企业对该标准要求的掌握并规范生产行为,同时加深临床机构对设备技术要点的理解,更好地将设备运用于临床手术中。
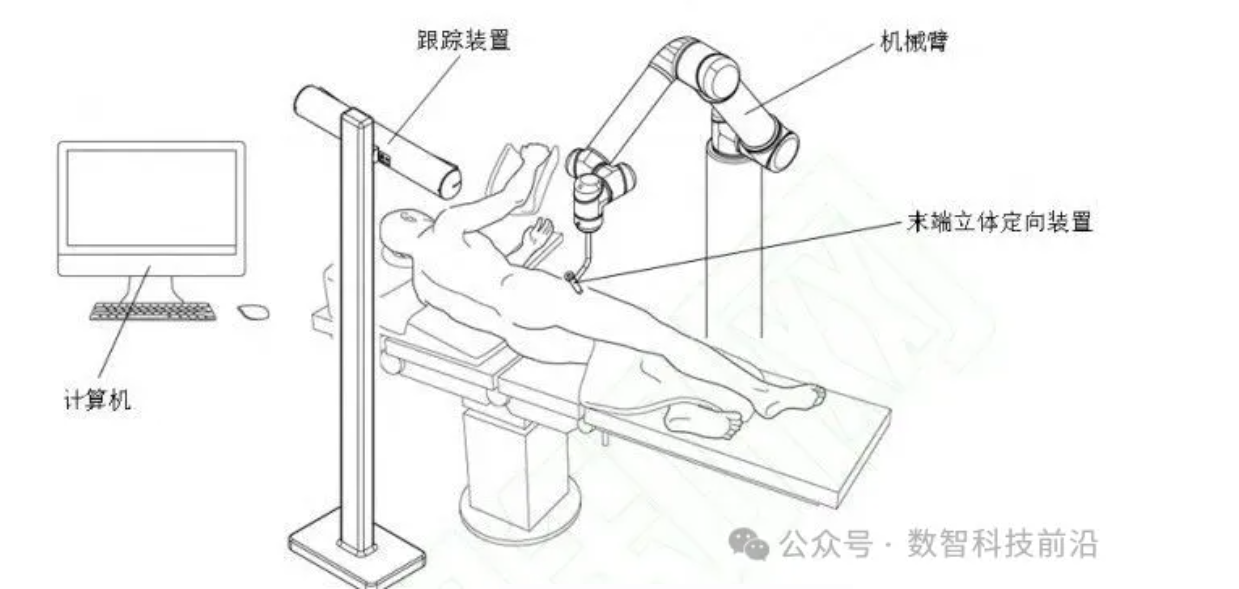
图 1 骨科手术导航设备示意图[11]
Fig.1 Schematic diagram of orthopedic surgical navigation equipment
1标准适用范围解读
标准YY/T1901-2023适用于骨科手术(如关节置换术、脊柱外科手术、创伤骨科手术等)导航设备。规定了骨科手术导航设备的性能要求,并描述了相应的试验方法。从监管途径上考虑,骨科手术导航设备为有源医疗器械,管理类别为三类,在《医疗器械分类目录》的分类情况为01有源手术器械-07手术导航、控制系统-01手术导航系统。对国家药品监督管理局网站数据统计后发现,目前已取得注册证的骨科手术导航设备近40个,涉及国内生产厂商和代理公司近30家。这些取得注册证的骨科手术导航设备主要涵盖脊柱外科手术导航定位系统、骨盆骨折复位手术导航定位系统、创伤骨科手术导航定位系统、膝关节置换手术导航定位系统、髋关节置换手术导航定位系统等。
本标准对手术导航设备的定义进行了规定,即由带有相关软件的计算机、跟踪装置等组成,能跟踪手术器械,或定位系统,或治疗对象,并通过数字模型可视化提供实时反馈的设备。该定义在美国材料实验协会(ASTM)发布的标准F2554−18《StandardPracticeforMeasurementofPositionalAccuracyofComputerAssistedSurgicalSystems》[12]术语基础上进行了修订。F2554−18 标准主要针对导航定位准确性,但不包含组合机械臂的性能及导航准确性以外的其他性能,而YY/T1901-2023 标准对导航产品整体性能的适用性和要求更为全面,并在附录A.1中明确了骨科手术导航设备的四要素:计算机系统、跟踪装置、机械臂、末端立体定向装置。根据临床应用实际情况,部分骨科手术导航设备为不带定位装置(如机械臂)的纯导航设备,其性能要求可参考本标准中的适用部分,其他光学导航类手术系统(不局限于骨科)亦可参照执行。
2术语和定义解读
本标准中的条款“3术语和定义”明确了“YY/T1712-2021界定的以及下列术语和定义适用于本文件”。因此,YY/T1712-2021已界定的术语在本标准中同样适用[1]。对于重新定义的术语,本标准均标明引自YY/T1712-2021[1]或F2554−18标准[12],并作了适应性修订。本文将重点解读以下几个重新定义的术语。
本标准在参考YY/T1712-2021中定义3.17的基础上,将末端执行器的定义修订为:为完成设备预期的手术任务而安装在机械臂末端接口处的动力装置。同时参考YY/T1712-2021标准中的定义3.18,将末端参考点的定义修订为:为一定用途而在末端执行器或末端立体定向装置上设定的参考点。并增加末端立体定向装置的定义:为完成设备预期的立体定向(或特定)手术任务而安装在机械臂末端机械接口处的非动力装置。
本标准对末端执行器的定义进行了修订,将具有磨、削、切、钻等功能的骨动力系统定义为执行器,并针对非动力装置创建了一个新的术语——末端立体定向装置。如此区分的目的是由于目前上市的骨科手术导航产品并非均含动力系统。临床上含动力系统的产品主要是关节置换术导航设备,其机械臂末端安装了磨钻或摆锯片,可在术中精准切削患者的骨组织,创造适合植入物大小和方位的植入空间,避免对周围组织产生损伤,从而减少手术并发症并提高植入物长期存活率[13]。具有动力系统的设备在使用过程中的风险明显高于非动力系统装置,进行术语上的区分有利于企业对各部件的风险把控。末端参考点的定义也是基于这个考虑而修改了描述。
本标准不仅考虑机械臂的定位,而且考虑了整个系统组合的性能,并定义了系统精度。系统精度受机械臂定位精度、跟踪装置精度、器械安装精度、软件算法配准精度等多方的影响,最终表现为机械臂末端装置实际到达位置/姿态与规划位置/姿态的偏差,该指标从整体角度对骨科手术导航设备的精确度进行了全面评估,为快速了解设备性能提供了参考。同时标准中还增加定位附件这一术语,并与一般附件作了区分,其是指在光学导航过程中所需使用的附件,如参考器件、末端立体定向装置、探针、校准工具、影像配准工具等。这些附件一般在患者环境中使用,对其表面质量、硬度、耐腐蚀性、消毒和灭菌的耐受性予以相应要求,可进一步提高手术安全。笔者对YY/T1712-2021与YY/T1901-2023标准的差异性进行了对比分析(表1),以便读者快速了解YY/T1901-2023标准更新的内容。
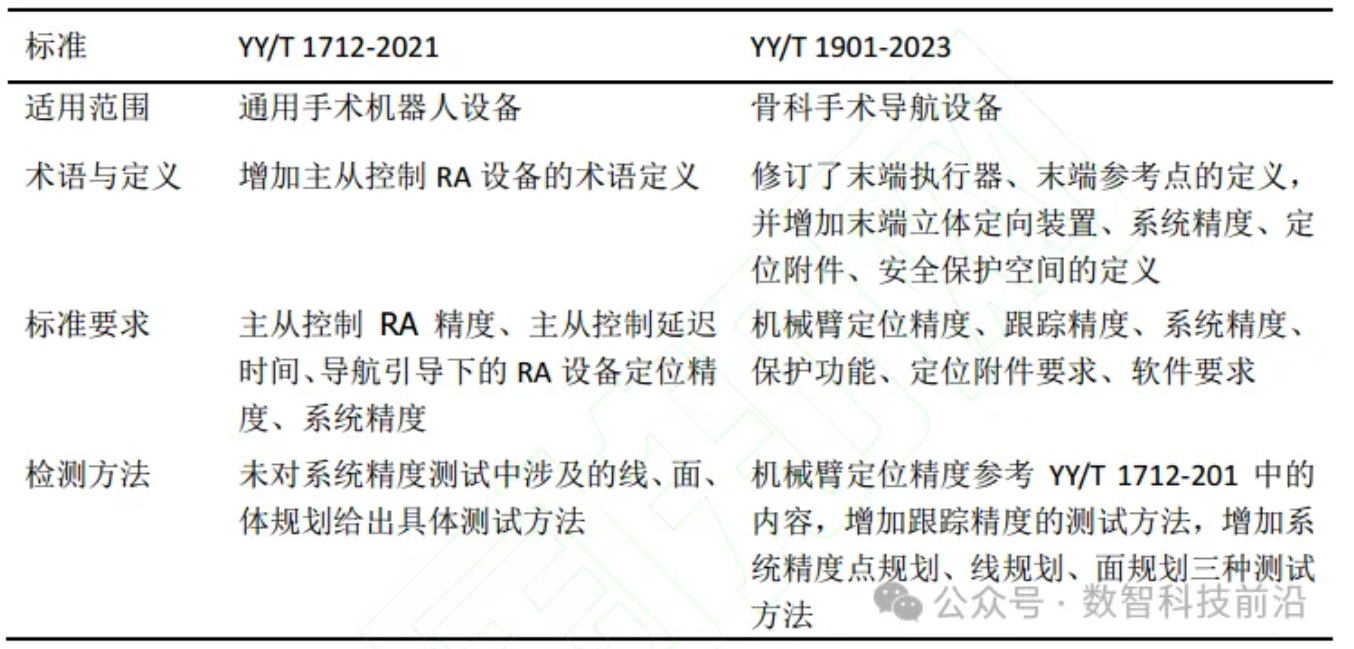
表 1 YY/T 1712-2021/YY/T 1901-2023 标准差异性对比分析
Tab.1 Analysis of differences between YY/T 1712-2021 and YY/T 1901-2023 standards
3要求及试验方法解读
本标准第四部分的“要求”,从不同方面对骨科手术导航设备的性能进行了界定,其包含通用要求、机械臂定位装置性能、跟踪装置性能、系统性能、安装重复性、保护功能、骨科动力手术设备、液体冷却、定位附件要求、软件要求共10个部分(图2)。标准的整体架构从临床角度出发,不仅满足骨科手术导航设备的性能技术指标,还充分考虑了机械安全、电气安全问题,包括设备应具有必要的保护功能。本文选取其中的重点部分及其试验方法进行阐述。
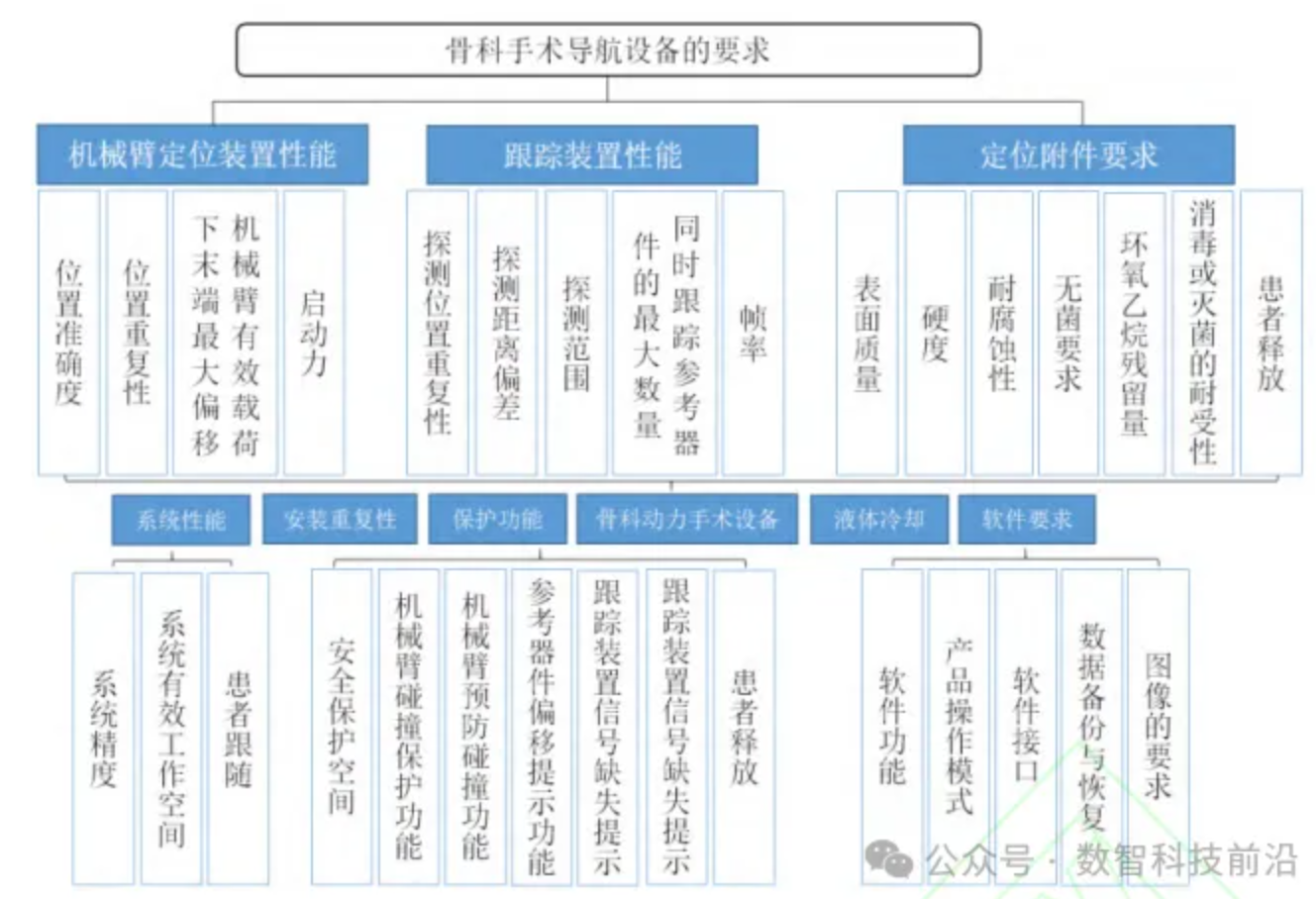
图 2 骨科手术导航设备要求及试验方法一览图
Fig.2 Overview of requirements and test methods for orthopedic surgical navigation equipment
3.1通用要求
通用要求部分中,明确提到须将设备适用的性能指标写入产品技术要求中,并在医疗器械注册过程中按照正式的文档控制程序进行评审、批准、发布和更改。这是由于在骨科手术导航设备检测过程中,机械臂的多项参数会对结果产生影响,比如位姿或某一手术阶段中机械臂的最大运行速度等。这些需制造商在检测方法中予以特别的说明和约定,以得到准确的检验结论并便于结果溯源,因此要求在文档中对这些条件具有细节描述。考虑到手术机器人领域发展非常迅猛,本标准为了适应产业技术发展,允许企业在本标准基础上根据要求设计拓展试验方法,但需给出完整的、具有细节的方法说明。
3.2机械臂定位装置性能
机械臂是骨科手术导航设备定位实施的主体,其定位准确度直接影响系统精度及手术安全性。本标准要求机械臂的位置准确度和重复性按照YY/T1712-2021标准5.3.2中规定的方法进行检测。此外,标准中对机械臂额定负载下末端最大偏移测试点进行了要求,其主要指末端执行器或末端立体定向装置在规定位姿下,到达有效工作空间内水平方向的最远位置。这需要首先解析有效工作空间的几何形状,方形、球形或不规则形状,然后找到这个形状在水平面上距离原点最远的投影点,以便对设备的定位装置性能进行测试。
3.3跟踪装置性能
导航系统跟踪装置的准确性会影响系统精度和整个系统的性能表现。目前主流跟踪装置(如NDI光学追踪系统)通过摄像系统实现空间定位,其性能受限于摄像系统的视场范围,所有光学导航过程中用到的校准工具均应在这个范围内使用,超出范围后不能被跟踪装置识别,因此在测试时,需要首先测定摄像系统的视场范围,然后在此范围内验证跟踪装置的性能。需验证的性能主要包括探测范围、探测位置重复性、探测距离偏差和跟踪帧率。在测量探测范围时,应在跟踪装置标称的探测范围上选取包括最近和最远端在内的至少3个垂直于视野轴线的典型切面,分别在每个切面上沿标称探测范围的边缘移动定位工具,观察手术导航设备软件中这个定位工具是否处于持续可见状态(图3)。
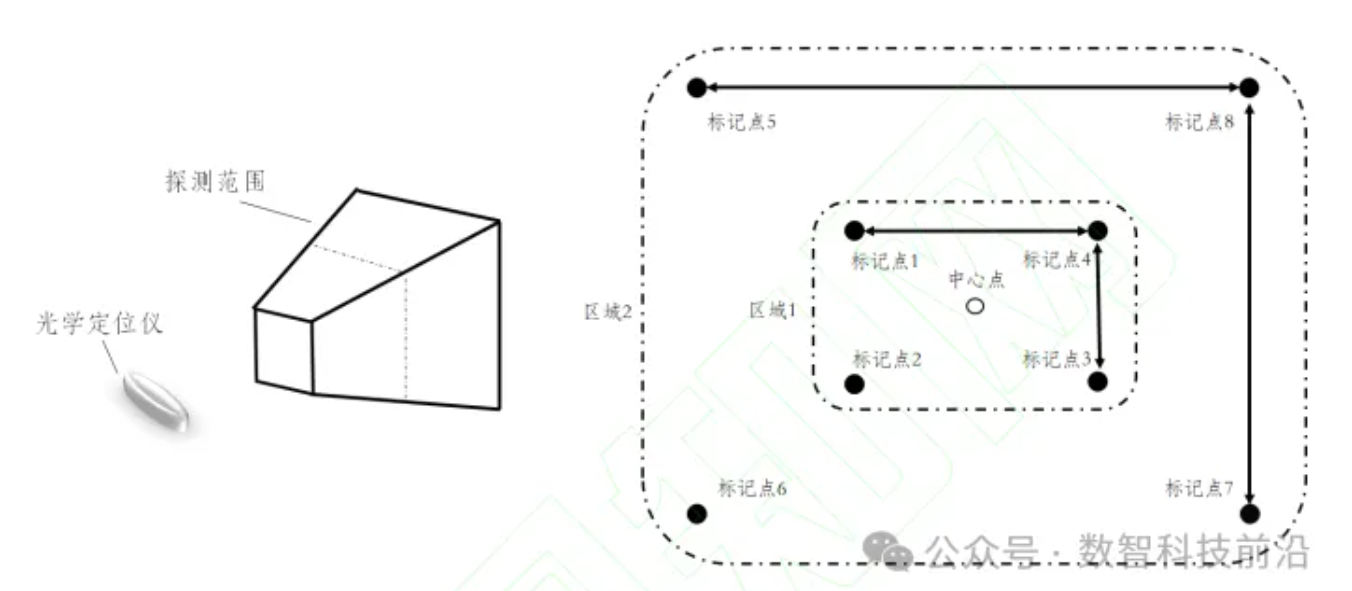
图 3 探测范围测试示意图
Fig.3 Schematic diagram of detection range testing
对于跟踪装置的探测重复性,实际上是测量带示踪参考器件的探针以不同角度的方向定位同一个点时的一致性。测试该项目主要是考虑到医生手持定位工具的角度不尽相同,且实际操作中医生可能会将装有反光球(靶球)的探测面背向跟踪装置,以致跟踪装置失效,因此采用重复性这个指标验证不同角度对跟踪效果的影响十分必要。在探测重复性测试过程中,测试点应选择探测范围内最近面和最远面的点进行试验,且探测工具应垂直放置测试6次,然后探测工具尖端保持不动,沿顺时针、逆时针方向分别旋转工具,并前后/左右倾斜工具,每次旋转/倾斜以15°角的增量进行(应至少包括初始0°在内的5个不同角度),每旋转/倾斜一次采集一次数据。探测重复性的计算方法:首先需获得多次测量结果的中心位置,然后计算各点到这个中心位置的距离,最后用平均距离加3倍标准差的形式进行拟合计算偏差。
探测距离偏差的测试方法(图4):对测试工装上至少3个正交方向上的点进行测量,然后将每个点的坐标测量值与通过手术导航设备自身软件记录的工具尖端空间坐标值进行比较(注意坐标系转换),以得出探测的距离偏差。测试时应尽量使工装内取点贴近探测范围最近面和最远面的边缘,且探测工具尽量竖直。对于跟踪帧率的测试,需注意跟踪单一参考器件与同时跟踪最大数量的参考器件时,输出给用户的位置信息帧率均应符合制造商的规定。
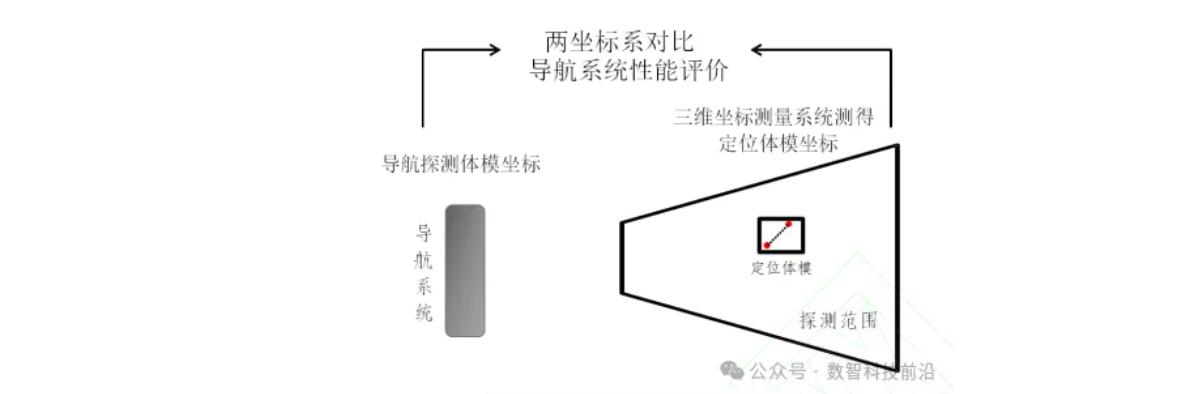
图 4 探测距离偏差测试示意图
Fig.4 Schematic diagram of detection distance deviation test
3.4系统性能
系统精度是设备性能的重要评价指标,其定义是末端执行器或末端立体定向装置实际到达的位置/姿态与规划位置/姿态之间的偏差。该偏差可能为距离偏差或是角度偏差,也可能是二者的组合,这取决于被测试设备的实际手术方式。本标准规定,制造商需在技术文件中明确给出系统精度的确切数据,并定义了点、线、面三种手术规划方式,此三种方式均尽可能的模拟了临床术式[14-16]。例如,点规划模拟了髋臼置换术,线规划模拟了钻孔植入骨钉的形式,面规划模拟了膝关节置换术中截骨平面的切除过程等。通过工程简化,此三种规划方式可基本完成对各类骨科导航手术机器人的系统性能评价。
对于点规划,一般是指测量点与规划点之间的距离偏差。线规划则可分为两种模式,其一是定义了起始点(入点),即机械臂末端执行器需经过起点指向终点,如图5中线规划BA、DC、FE为目标直线示例;其二是无起始点,即仅需要考虑末端工装到达终点后的指向向量与规划路径的向量夹角。面规划也有类似情况,主要是根据手术导航设备所做的路径规划选取特征点,计算测试点到目标平面的距离以及测试设备末端实际到达平面与目标平面的夹角,如图5中面AEF平面为目标平面示例。本标准规定,无论是点规划、线规划还是面规划,如有多种规划方式应分别对每一种方式进行检验,且在每种规划测试中,均需选择三种不同的规划路径测量三次。如图5所示,选择线规划时,机械臂从三个不同的方向按不同的直线路径进行运动。三次运动过程中机械臂轴位的姿态一般不同,以此消除单姿态往复运动带来的测量偶然性。
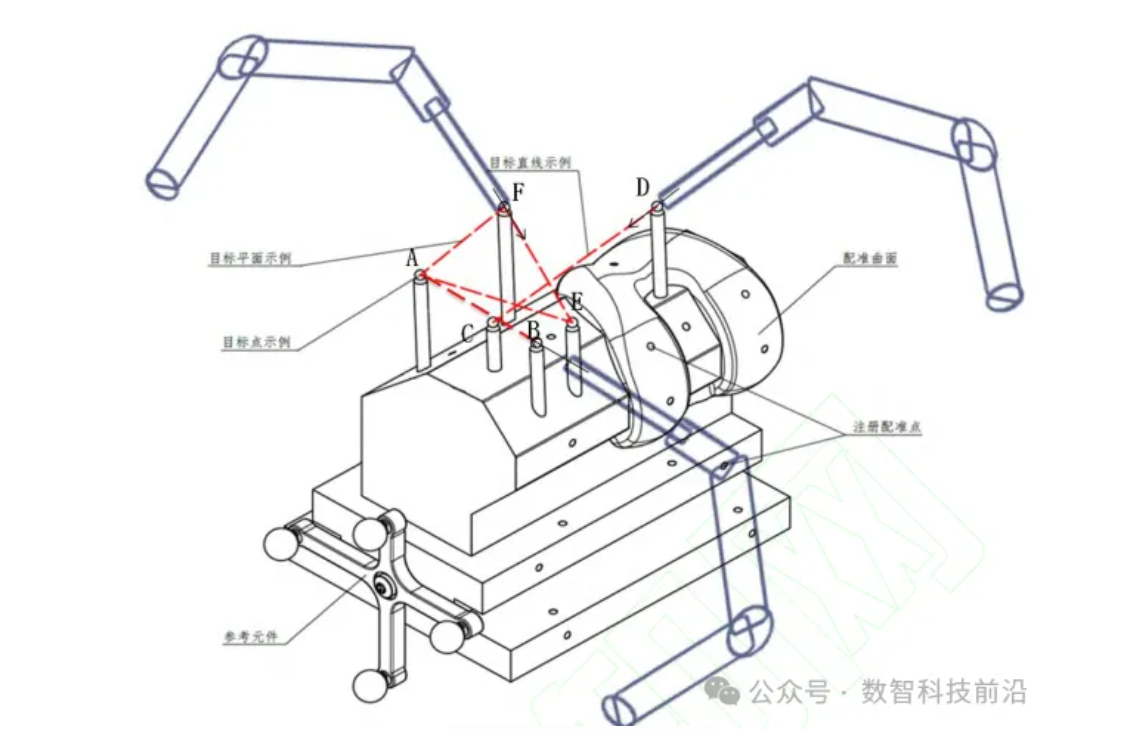
图 5 系统精度测试示意图
Fig.5 Schematic diagram of system accuracy testing
在实际检测过程中,通常用三维坐标测量系统测出A、B、C、D、E、F六个点的三维坐标,在体模与机器人设备完成配对后,移除体模,机器人设备控制机械臂在留出的空间从理论上的B点运动至A点,每次运动到位后用三坐标测量系统测量器械末端坐标值并记为A’,器械远端坐标值记为B’(该B’点不一定与B点位置完全对应),计算A’与A的距离偏差,以及B’A’与BA的角度偏差。采用同样方法完成规划路径DC、FE的测试。本文选取一款骨科手术导航设备按上述试验方法进行测试,并计算三次测量的均值,最终得到系统精度的距离偏差为0.444mm,角度偏差为0.239°(表2)。现有的手术机器人导航设备声称的距离精度一般为0.5~5.0mm,角度精度为1.0°~5.0°。通过上述方法检测的机器人距离与角度偏差分别处于10-1mm与10-1°量级,表明该手术机器人空间定位与姿态测量精度可满足相关手术要求。
表 2 线规划系统精度测试结果
Table 2 System Accuracy Testing Results of Line Planning

本标准还涉及了虚拟约束的内容,其是相对于骨科手术导航设备的物理约束而提出的概念。一些产品采用导向槽形式,在实际手术过程中,机械臂完成定位后,在手术过程中保持不动,该类约束属于物理约束,此时仅需在机械臂定位后进行一次测量即可完成系统精度的评价。虚拟约束是基于软件算法实现的动态运动限制,机械臂完成初始定位后,允许机械臂在虚拟约束的方向或平面内运动。在此模式下,机械臂除末端执行器的姿态外,其他关节的姿态可能会发生变化,这一变化将会引起偏差出现波动,因此在测量时需在初始位置和极限位置进行两次测量,以使系统精度的评价更加全面。找准设备的约束平面,并让机械臂运行至约束平面的极限位置,是该项系统精度测试的重点。
患者跟随主要是模拟在患者身上的被追踪参考器件产生非预期运动时,机械臂通过位置补偿使得末端执行器保持相对位置/姿态不变的功能。例如患者呼吸时产生的胸廓运动会使参考器件发生轻微运动,有患者跟随功能的设备应能使机械臂按照参考器件运动的方向进行跟随运动。在本标准中,对于具有实时患者跟随模式的骨科手术导航设备,其跟随过程最大偏移量通常仅考虑了定位器移动方向的分量。在现有测试设备与技术条件下,对机械臂的运动状态进行了“静态”简化,如患者跟随中仅考虑机械臂沿患者定位参考架运动方向上的距离分量变化,而忽略机械臂在跟随过程中其他方向上的轻微抖动造成的影响。为保证检测过程中的可操作性及复现性,故在标准编制时仅考虑了运动方向上的偏移量。
3.5保护功能
骨科手术导航设备在临床应用中,除了要求可精准定位、抵达、切削病灶外,还应尽量将对周围组织的损伤降至最小。特别是有动力系统的产品,应设置一个安全保护区域,骨钻、锯片一旦超出此范围,立即停止工作并出现软件弹窗或语音提示,这是对整个控制系统以及软件的基本要求,也是医用机器人风险控制的关键必要点。
除了设定安全保护区域外,机械臂碰撞保护功能也提高手术安全性的重要措施。其主要是指机械臂在受到非预期的碰撞力或力矩时,应具有相应的警示并立即停止运动。虽然力/力矩的测量技术已相对成熟,但阈值的合理设定才是实现有效保护的关键。从临床角度分析,阈值设定需充分考虑机械臂的具体功能定位。以骨科手术为例,在进行骨切削、磨钻等高应力操作时,机械臂会承受显著的反向作用力,此时设定的保护阈值须高于这些预期的反向作用力;反之对于预期不会遭遇高强度碰撞的机械臂末端参考器,则应采用更为敏感的阈值设置。制造商在确定碰撞保护参数时,应充分考虑临床应用实际情况,根据不同的手术阶段中机械臂的活动区域以及正常使用中可能受到的应力,综合确定碰撞保护力阈值,且建议在技术参数中以范围值或最低限值的形式明确标注。
4标准实施解读与讨论
YY/T1901-2023标准于2024年9月15日正式实施。在该标准发布前,市场上已有部分采用类似技术原理的骨科手术导航设备投入临床使用,但由于缺乏统一的评价方法,该领域面临产品定位性能、操作性能等定义方式不统一,生产企业提供的检测方法未对校准坐标系和校准方法进行溯源,产品从设计研发到上市、监管各个环节无标准可依的现状。
本标准对骨科手术导航系统的关键组成部分提出了明确的技术要求和试验方法,其中跟踪装置、机械臂和系统整体的性能均有相应规定。本标准的实施,明确了采用机器人技术的骨科手术导航设备应满足的基本性能要求,同时揭示了该类设备在生产应用中需注意的关键技术点。首先,机械臂本身的定位准确度与导航实时追踪指示的机械臂坐标形成了一个反馈闭环,一定程度上可协同影响设备的整体系统精度。本标准不仅关注机械臂和跟踪装置的单项性能,更强调系统整体精度的重要性,同时提出了虚拟约束、患者跟随等实际临床场景下的测试要求,从部件到整体更全面地对产品进行了评价,符合此类产品从生产、研发到注册、监管的要求。其次,本标准关注了附件本身性能、安装性能对系统精度的影响,如机械臂末端器械安装的重复性,包括器械与末端安装部的吻合程度、锁止装置的锁止力大小,这些可能影响安装重复性进而影响系统精度。从部件到整机,再到附件,本标准近乎考虑了机器人系统精度的全要素,有利于推动企业从部件到整机全流程把控产品质量。最后,本标准首次将安全保护功能(如碰撞保护、安全保护空间)作为重要指标纳入机器人骨科手术导航设备的质量评价标准,强调软件和硬件对临床安全需求的保障作用,填补了此前手术机器人相关标准对临床风险防控方面的不足。
本标准所规定的骨科手术导航设备技术特点和试验方法均基于现有产品特性而制定,由于骨科机器人行业技术迭代迅速,应用场景持续拓展,导致本标准的适应性与前瞻性面临考验。例如,检测设备的高成本应成为标准落地过程中需要重点考量的问题。同时,标准实施过程中应考虑临床适配性,例如动态性能、轨迹跟踪等临床实际中存在的情况,虽尚未纳入当前质量评价体系,但应作为未来技术预研和标准更新的重点方向。此外,随着机器人技术与临床应用场景的深度融合,新的技术指标与性能需求不断涌现,均会对本标准的适用性发出挑战。为推动骨科手术导航设备产业规范化、高质量发展,建议从以下两个维度推进本标准的实施与发展:其一,加速研发检测精度更高、自动化程度更强、通用性更佳的检测系统,以降低企业执行成本;其二,密切关注行业技术演进与临床实践变化,及时更新标准内容,确保技术要求与产业发展相适应,实现标准对行业创新的引领与规范作用。
5小结
作为当前市场占有率较高的手术机器人品类,骨科手术导航系统属于高度集成多学科技术的创新型医疗器械,其产品质量直接决定临床手术效果和患者安全,但目前尚缺乏此类设备性能规定的指导性文件。在此背景下,YY/T1901-2023标准的颁布与实施,为骨科手术导航设备构建了统一的质量评价体系。该标准不仅有助于系统梳理行业共性技术难题,还可有效推动技术发展、规范产品生产、强化产品监管,为促进产品标准化、产业科学化发展奠定了重要基础。
值得注意的是,我国在手术机器人标准化建设领域正呈现体系化推进态势。除专项标准外,国家相关部门正加速制定新的更广泛的行业规范---20251569-T-464 采用机器人技术的辅助手术设备模块化 第1部分:通用要求 。该标准着眼于模块化设计理念,通过确立通用技术要求,为手术机器人产品的功能扩展、系统集成和临床适配提供了基础框架。这两个标准的协同实施,将既保证了骨科手术导航系统等细分领域的专业规范,又构建了辅助手术设备全生命周期管理的标准化体系,标志着我国医疗机器人产业正从技术突破迈向规范引领的新阶段。

文章引用:唐桥虹,孟祥峰,王浩,李澍.行业标准《采用机器人技术的骨科手术导航设备要求及试验方法》解析[J/OL].协和医学杂志.https://link.cnki.net/urlid/11.5882.R.20250711.1106.004
来源:数智科技前沿
说明:艾瑞迈迪转载内容力求专业、可靠,但不对其准确性做出承诺,建议相关各方在采用或作为决策依据时自行核查。