
在科技飞速发展与医疗需求日益增长的双重驱动下,中国医疗手术机器人市场正展现出蓬勃生机与巨大潜力。据中商产业研究院发布的报告指出,2023 年中国手术机器人市场规模已攀升至约 71.7 亿元,近五年年均复合增长率高达 27.54%,发展势头迅猛。然而,尽管产业整体蒸蒸日上,手术机器视觉这一关键领域却依然面临诸多棘手的瓶颈问题,严重桎梏着手术场景智能感知的进程,亦成为手术智能化转型途中难以逾越的关键障碍。
目前,手术场景智能感知技术的发展主要遭遇三大瓶颈。
1.场景建模与实时高精定位难以平衡兼顾
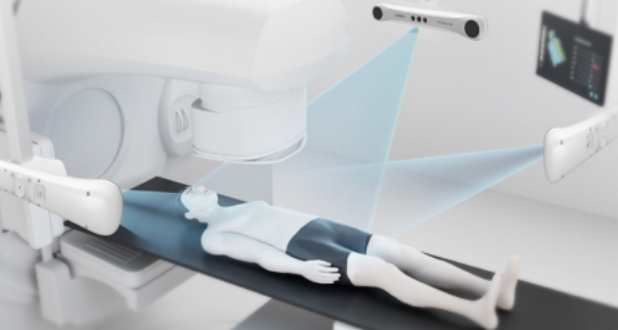
在复杂的手术场景智能感知任务里,立体视觉系统肩负着高精度捕捉和追踪视场内医生手部、手术器械以及患者病灶区域组织结构实时三维信息的重任,且对手术器械的定位精度要求严苛,需达到亚毫米级。然而,当下主流的解决方案中,核心定位部件虽具备高精度定位能力,却受限于刷新率和计算资源的束缚,无法同时实现手术场景的实时感知与高精跟踪,二者难以兼得。
2.多源数据时空融合面临重重困难
手术场景所涉及的感知数据来源广泛多样,涵盖二维医学影像、二维自然影像、三维医学影像以及三维空间点云数据等。要精准地将这些多源数据在时空维度上进行融合,是智慧手术面临的核心挑战之一。主流光学定位核心部件目前仅能提供二维自然影像与手术器械的三维定位信息,对于适用于场景感知与理解的多模态数据难以获取,更无法有效支持多模态数据间的关联融合,致使现有手术场景时空信息获取渠道单一,医生可依据其进行手术决策的信息存在明显不足。
3.手术机器人核心的光学定位模块过度依赖进口
国产光学导航系统装机率偏低,这直接导致产品创新迭代周期被迫延长至国际竞品的 2 - 3 倍。在国际形势风云变幻的当下,若遭遇技术封锁,很可能引发行业连锁反应,致使整条手术机器人产业链陷入停摆危机,给国内手术机器人产业生态的稳定发展蒙上一层阴影。
从临床应用角度来看,医院在手术场景中对智能感知技术的需求主要聚焦于两个方面。
1. 期望能够实现对患者病灶、患者脏器的无标实时感知,例如精准识别脏器的形变、位移等细微变化,并进行实时重建与识别;
2. 亟待实现对医生手部动作和手术器械的无标实时感知,从而为手术提供更为全面、精准、实时的感知信息,助力医生更为高效、精准地开展手术操作。
一旦智能感知技术取得突破性进展,将给手术场景带来颠覆性的变革。最为核心的体现就在于能够对实际手术场景做到实时的 3D 感知和场景理解。“3D 感知” 意味着可以对手术场景内的所有元素进行实时三维重建,呈现出一个立体、直观且全面的手术视野;而 “场景理解” 则是在此基础上,针对实时三维重建的点云数据,能够精准分析医生的行为意图、器械的实时状态以及患者脏器的运动规律等关键信息。未来,随着技术的深入发展,智能感知技术有望与大模型实现深度耦合,构建起手术机器人 “重建 - 识别 - 决策 - 执行” 的完整闭环机制,真正实现对手术场景的全面革新与升级。
在攻克手术场景智能感知技术难题的征程中,艾瑞迈迪公司凭借其在该领域的深厚积累与持续创新,取得了众多进展。其全国产自主研发的多源光场融合重建与定位系统成功实现了对手术场景的实时三维重建以及手术器械的高精度跟踪定位,将场景重建误差严格控制在小于 0.3mm,器械定位误差更是低于 0.1mm。尤为关键的是,该系统确保了器械跟踪数据与场景重建点云处于同一坐标系,巧妙地省去了传统重建与定位系统繁琐复杂的标定流程。
同时,依托超高帧率影像采集技术与亚毫米级定位算法,该系统能够同步采集二维可见光影像以及动态重建的三维点云数据。借助高精度空间配准算法,进一步实现多模态数据的精准融合与增强渲染,从而为术中导航、机器人协同等临床应用提供了坚实且可靠的技术支撑。